Listening in to the crowd there was an obvious demand for controlling and monitoring a Worx Landroid lawn mower, so we sat down and made a plugin for the Dragstone platform! It works great and I’m already looking forward to release the robot for a first run this summer and watch it do it’s work.
For you users out there that is into controlling and monitoring your robotic slave, there are probably a couple of scenarios that has to be thought about before fully labeling your solutions as fully autonomous.
Some rules that you probably would have to think about:
1. To much sun. During a prolonged heat period the lawn should rest. The grass is providing shade for the soil so don’t cut it to often.
2. To moist. Has it rained lately? The lawn mover will get dirty and also do a worse job in cutting your grass because the grass is either laying down or is forced down by the robot when it operates on your lawn.
3. To much dew? The same reason for not cutting it as in point 2 above, but this is only a problem after a chilly night. The lawn will dry up but don’t schedule your Worx Landroid to early.
4. Disturbing the surroundings? It may be neighbors or it may be your kids, your pets or even a reoccurring event that takes place in the vicinity of your robot doing its work. How can this be avoided?
5. Charging. Is it worth it to recharge the Worx Landroid only on hours where the electricity is cheap or is the money saved negligible? How much power does a charge-cycle consume?
Having these questions in the back of your head; is the toolbox provided with Dragstone sufficient for the task or is there some logical plugins missing?
Is there any scenarios that I didn’t think of? Feel free to discuss your ideas in the forums!
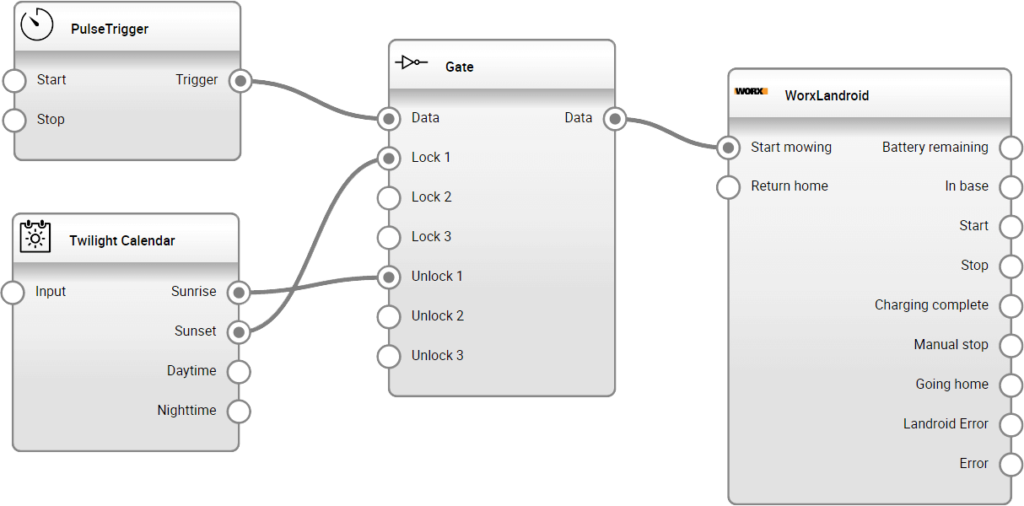
Below is a very basic example of controlling the Start of the Worx Landroid. Can you see what is missing? :)